


机械工程学院服务机器人与仿生设计团队发表高水平封面期刊论文
日期:2025-03-14 | 访问量:
近日,机械工程学院青年教师房德磊所在服务机器人与仿生设计团队,在中国科技期刊卓越行动计划《Biomimetic Intelligence and Robotics》期刊发表封面文章,题为《A bionic robotic ankle driven by the multiple pneumatic muscle actuators》,该团队在人工肌肉驱动控制方面取得了创新性科研成果。
针对传统气动肌肉驱动型机器人关节负载能力弱、控制精度低等问题,团队提出一种新型多气动肌肉驱动型仿生踝关节。研究包括仿生踝关节的结构设计与仿生人体肌肉募集驱动机理;建立仿生踝关节动力学模型和气动肌肉静态模型,分析仿生踝关节的驱动特性。
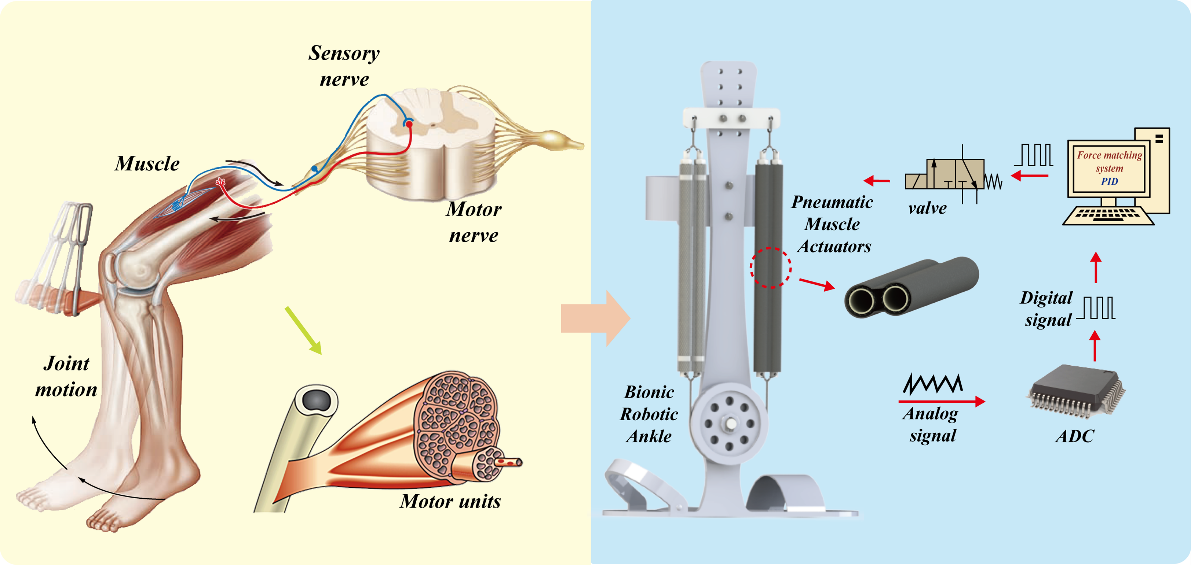
图1 仿生人体多肌肉驱动结构的仿生踝关节设计
同时,团队提出多气动肌肉募集策略和负载匹配控制方法,研究单气动肌肉驱动型机器人踝关节、双气动肌肉驱动型机器人踝关节以及多气动肌肉驱动型仿生踝关节的输出特性。

图2 仿生踝关节负载匹配控制原理图
研究表明,该仿生踝关节可以实现多种不同气动肌肉输出组合,增加了负载匹配范围。同时,多气动肌肉型关节可以根据负载变化实现实时匹配输出,尤其在大负载范围,相比传统气动肌肉关节具有良好的角度跟踪性能。以上研究成果在推动穿戴式机器人、智能人形机器人的理论研究与实用发展方面具有重要意义。
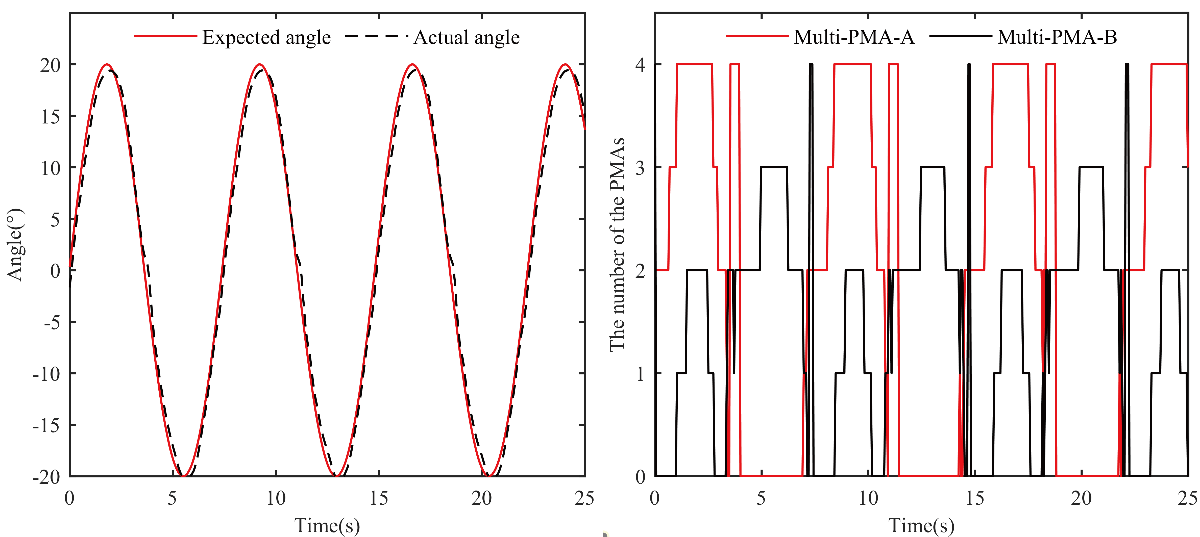
图3仿生多肌肉驱动型踝关节特性曲线